Nova Eletrônica Seu site de Eletrônica com Informações, dicas, esquemas, noticias sobre a eletrônica profissional e hobbysta
Nova Eletrônica Seu site de Eletrônica com Informações, dicas, esquemas, noticias sobre a eletrônica profissional e hobbysta

Todos sabemos que o Arduino não tem processador o suficiente para trabalhar com vídeo, mas um escudo poderia fazer esse trabalho, é mais ou menos isso que uma placa chamada de Pixy pretende fazer, não só para o Arduino, mas para qualquer plataforma de controladores. Pixy é um sensor de visão rápido que você pode “ensinar” a encontrar objetos, se conecta diretamente ao Arduino ou a qualquer outro controlador através das várias interfaces, UART de série, SPI, I2C, saída digital ou analógica.
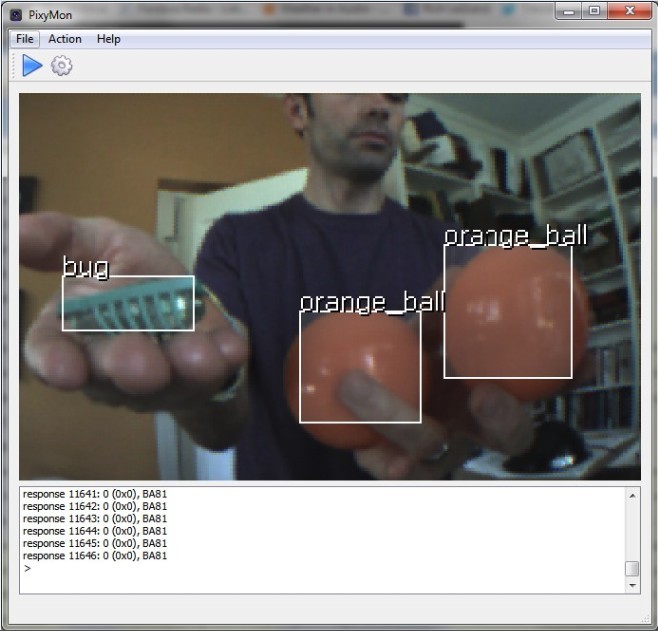
A falta de processador e memoria dos pequenos como o arduino para trabalhar com imagens é suplementada pelo Pixy, ele resolve esses problemas com um processador poderoso e um sensor de imagem. Pixy processa as imagens do sensor e só envia as informações úteis, por exemplo, se programar para detectar bolas amarelas, ele vai encontrar apenas a bola amarela no meio de centenas de bolas coloridas, e dizer para o microcontrolador, bola detectada em x = 51, y = 101, e ele faz isso na taxa de 50 Hz.
A informação está disponível através de uma das várias interfaces, portanto, o seu Arduino ou qualquer outro microcontrolador pode comunicar-se facilmente com o Pixy e ainda tem muito de CPU disponível para outras tarefas. É possível ligar vários Pixys ao seu microcontrolador,por exemplo, um robô com quatro Pixys vai ter 360 graus de detecção. Ou use o Pixy sozinho, sem um microcontrolador, apenas usando as saídas digitais ou analógicas para acionar comandos, interruptores, servos, etc
Detecta cores 7 cores diferentes ao mesmo tempo
Pixy usa um algoritmo de filtragem de cores baseado no tom para detectar objetos. A maioria de nós estão familiarizados com RGB (vermelho, verde e azul) para representar as cores. Pixy calcula o matiz e a saturação de cada pixel RGB do sensor de imagem e usa como os parâmetros de filtragem primária. A tonalidade de um objeto permanece praticamente inalterada com as mudanças na iluminação e exposição. Alterações na iluminação e exposição pode ter um efeito frustrante em algoritmos de filtragem de cor, provocando-lhes falhas.
O algoritmo de filtragem do Pixy é robusta quando se trata de mudanças de iluminação e exposição, e significativamente melhores do que as versões anteriores do CMUcam. Pixy lembra de até 7 cores diferentes , o que significa que se você tiver sete objetos diferentes, com cores exclusivas, o algoritmo de filtragem de cores do Pixy não terá nenhum problema em identificá-los.
Rápido para assistir uma partida de ping-pong
Ele capta 50 frames por segundo e processa todo um quadro em imagem de 640×400. Isso significa que você pode obter uma atualização completa de todos os lugares de objetos detectados a cada 20 ms. Ele é rápido o suficiente para assistir uma partida de ping-pong.
Especificações técnicas
Processador: NXP LPC4330 , 204 MHz, dual core
Sensor de imagem: Omnivision OV9715 , 1/4 “, 1280×800
Lens campo de visão: 75 graus horizontal, 47 graus verticais
Tipo de lente: standard M12 (vários tipos disponíveis)
Consumo de energia: 140 mA típico
Potência de entrada: entrada USB (5V) ou entrada não regulamentada (6V a 10V)
RAM: bytes 264K
Flash: bytes 1M
Saídas de dados disponíveis: de série UART, SPI, I2C, USB, digital, analógico
Dimensões: 2.1 “x 1.75″ x 1.4 ”
[Fonte]